 Carnegie Mellon University School of Computer Science Executive and Professional Education
Carnegie Mellon University School of Computer Science Executive and Professional Education
Skip to Main Content
Advanced Robot Autonomy
What You’ll Learn
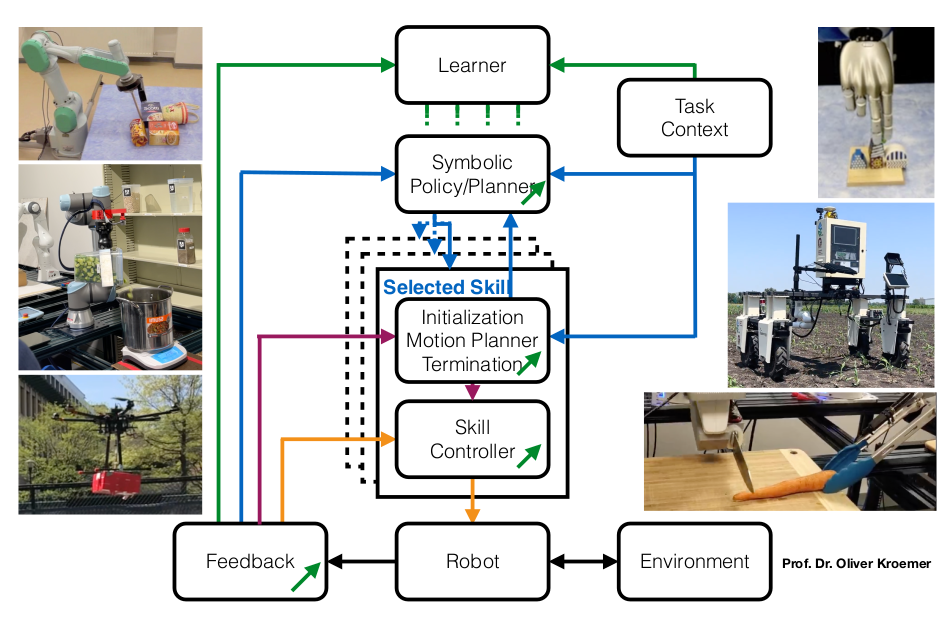
Robot Autonomy delves into the interplay between perception, manipulation, planning, and learning for autonomous systems. These components are required to develop autonomous robots for a wide range of domains including households, manufacturing, service industries, and healthcare. The course will explain the implementations, applications, and limitations of algorithms for each component, as well as how to combine them to create fully autonomous robot systems. The course emphasizes the implementation of the algorithms discussed in class through homework assignments in simulation as well as labs and class projects on real robots.
This course builds on the Introduction to Robot Autonomy course and with a focus on teaching students core topics of robot learning through lectures and a hands-on project including interim project meetings.
Course Topics
MDPs and Fundamentals of RL- Markov Decision Processes
- Value function methods
- Exploration strategies and Bayesian Optimization
- Options framework
- Skill discovery and segmentation
- Error detection and recovery
- Skill representations
- Reinforcement learning for robot skill acquisition
- Behavioral cloning
- Apprenticeship learning
- Interactive perception
- Deep learning and robot vision
- Error detection and recovery
- Manipulation
- Mobile Robotics
- Human Robot Interaction
- Multiagent Systems
- Locomotion
- Aerial Robotics